以smplx模型为例,open3d==0.15.1 1. 直接加载有正确mtl文件的obj模型 可视化 纹理: 结果: 2.为mesh添加纹理 如果考虑变换mesh,并且还能...
 发简信
发简信
IP属地:广东

以smplx模型为例,open3d==0.15.1 1. 直接加载有正确mtl文件的obj模型 可视化 纹理: 结果: 2.为mesh添加纹理 如果考虑变换mesh,并且还能...
群 定义 一个集合+一种封闭元算的数据结构:,集合为A,运算为 运算规则: 封闭性: 结合律: 幺元: 逆: 李群 由于特殊正交群 与特殊欧式群对于加法不封闭,对乘法封闭,所...

paper:Collaborative Regression of Expressive Bodies using Moderation[https://ps.is.mpg....
几种重要的仿射集 nameclass仿射集,凸集,凸锥仿射集,凸集,凸锥任意直线仿射集,凸集,凸锥(过原点)任意线段凸集,射线 凸集,凸锥超平面 仿射集,凸集,凸锥(过原点)...

问题:字符串str1和str2,str1是否包含str2,如果包含返回str2在str1中开始的位置。例如:str1:“ABC12345de”,str2:"12345" 就是...
1.仿射集(affine set.) 1.1 定义 方式一:,则连接 的直线也在中方式二(仿射组合): 直线的例子:定义一条直线:or :当 1.2 与(仿射集)相关的子空间...

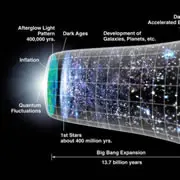
Introduction 用来估计视频中周期动作的周期 贡献: RepNet to leverages a temporal self-similarity matrix. ...

Target 拟合两副点云图的对应关系,从而得到旋转位移矩阵,一般针对刚性物体场景其中表示两副点云图中的对应点坐标值。 推导 1.给定初始化的:用相机外参将点云变换到同一个坐...

定义:c1为坐标原点,当作相机的起始位置 其中 为图像中的像素坐标, 是相机的旋转和位移矩阵,对应像素坐标点的深度 当深度为1时定义归一化平面为:, 1.epipolar ...

The volumetric truncated signed distance function[https://graphics.stanford.edu/papers/...

AGORA: Avatars in Geography Optimized for Regression Analysis[https://arxiv.org/pdf/210...

conda env test valid. pip env not to test. Q1: macos 下,使用pyrender进行渲染,加载pyopengl库,找不到位置...

Neural Body: Implicit Neural Representations with Structured Latent Codes for Novel Vie...
一个简单的踩坑记录过程~ 目标 在边缘设备使用AI加速硬件进行模型的加速,目前主流的边缘加速硬件有:npu,tpu,gpu。 由于边缘加速硬件的计算资源有限,这里一般指其一定...